一、长期依赖问题(Long-Term Dependencies)
循环神经网络(RNN)在实际应用中很难处理长距离依赖的问题。
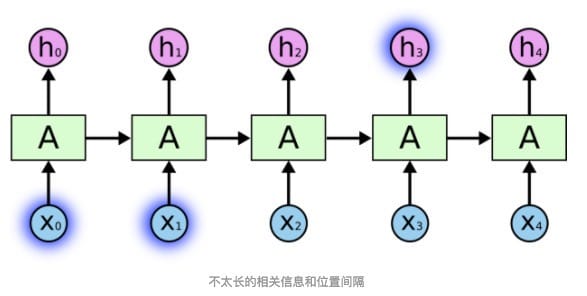
有的时候,我们仅仅需要知道先前的信息来完成预测任务。例如,我们有一个语言模型用来基于先前的词来预测下一个词,比如我们预测“the clouds are in the sky”最后的词的时候,我们不需要任何其他的上下文,很显然下一个词就是sky。在这种情况下,相关的信息与需要预测的词位置之间的间隔很小,而RNN可以学会使用较近距离的信息。
但是到了一个更加复杂的场景,假设我们试着预测“I grew up in France……I speak fluent French”中最后的词,从这句话的信息来看,下一个词很有可能是一种语言的名字,但具体到是哪种语言,我们就需要在与之距离较远的“I grew up in France”中得到。这说明相关信息与当前预测位置之间的间隔就肯定变得相当的大。
不幸的是,在这个间隔不断增大时,RNN会丧失学习到连接如此远的信息的能力。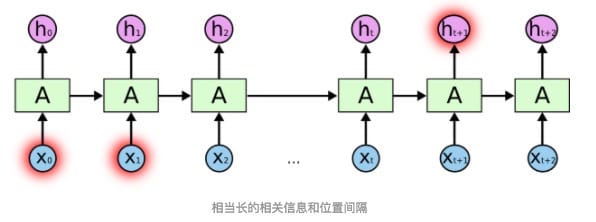
当然,在理论上,RNN绝对可以处理这样的长期依赖问题。人们可以通过调参来解决,但是在实践中,RNN肯定不能够成功学习到这些知识。Bengio, et al. (1994)等人对该问题进行了深入的研究,它们发现一些使训练RNN变得非常困难的相当根本的原因。
既然找到了问题的原因,那我们就能解决它。从问题的定位到解决,科学家们大概花了7、8年的时间。终于有一天,Hochreiter和Schmidhuber两位科学家发明出长短时记忆网络,一举解决了这个问题。
二、LSTM的核心思想
Long Short Term网络,一般就叫做LSTM,是一种特殊的RNN变体,它可以学习长期依赖信息。LSTM由Hochreiter和Schmidhuber在1997年提出,并在近期被Alex Graves进行了改良和推广。在很多问题上,LSTM都取得了相当巨大的成功,并得到了广泛的使用。
LSTM通过刻意的设计来避免长期依赖问题。记住长期的信息在实践中是LSTM的默认属性,而非需要付出很大的代价才能获得的能力!
所有的RNN都具有一种重复神经网络模块的链式的形式。在标准的RNN中,这个重复的模块只有一个非常简单的结构,例如一个tanh层。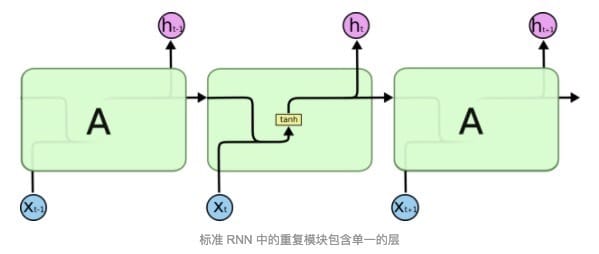
LSTM同样是这样的结构,但是其中重复的模块拥有一个不同的结构。不同于单一神经网络层,这里有四个以非常特殊的方式进行交互的小器件。
图中每一条黑线传输着一整个向量,从一个节点的输出到其他节点的输入。粉色的圈代表pointwise的操作,比如向量的和,而黄色的矩阵就是学习到的神经网络层。
LSTM的关键在于细胞(Cell),水平线在细胞内贯穿运行。细胞类似于传送带。直接在整个链上运行,只有一些少量的线性交互。信息在水平线上很容易保持不变。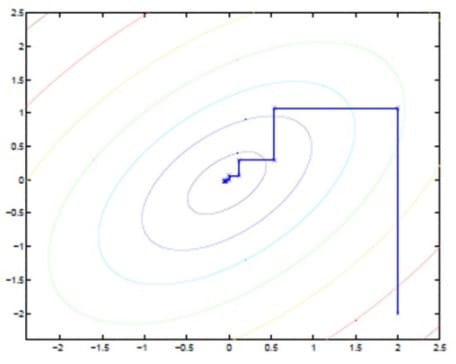
LSTM通过精心设计“门”结构来去除或者增加信息到Cell上。门是一种让信息选择式通过的方法(过滤器)。它们包含一个sigmoid神经网络层和一个pointwise乘法操作。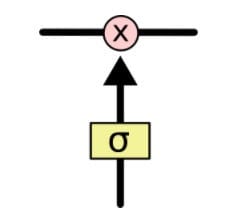
Sigmoid层输出0到1之间的数值,描述每个部分有多少量可以通过。0代表“不许任何量通过”,1就指“允许任意量通过”
三、LSTM的前向计算
LSTM用两个门来控制单元状态Cell的内容,一个是遗忘门(forget gate),它决定了上一时刻的单元状态$c_t-1$有多少保留到当前时刻$c_t$;另一个是输入门(input gate),他决定了当前时刻网络的输入$x_t$有多少保存到单元状态$c_t$。LSTM用输出门(output gate)来控制单元状态$c_t$有多少输出到LSTM的当前输出值$h_t$。
3.1 遗忘门
我们先看一下遗忘门:
上式中,$W_f$是遗忘门的权重矩阵,$[h_{t-1},x_t]$表示把两个向量连接成一个更长的向量,$b_f$是遗忘门的偏置项,$\sigma$是sigmoid函数。若输入的维度是$d_x$,隐藏层的维度是$d_h$,单元状态的维度是$d_c$(通常$d_c=d_h$),则遗忘门的权重矩阵$W_f$维度是$d_c×(d_h+d_x)$。事实上,权重矩阵$W_f$都是两个矩阵拼接而成的:一个是$W_{fh}$,它对应着输入项$h_{t-1}$,其维度为$d_c×d_h$;一个是$W_{fx}$,它对应着输入项$x_t$,其维度为$d_c×d_x$。$W_f$可以写为:
所以总结一下,遗忘门的作用为控制有多少上一时刻的memory cell中的信息可以累积到当前时刻的memory cell中。其数学公式可以写作:
其计算图示如下: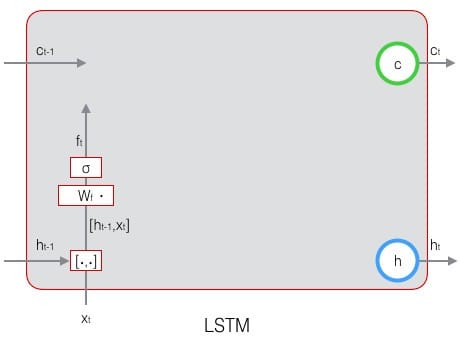
3.2 输入门
接下来看输入门:
上式中,$W_i$是输入们的权重矩阵,$b_i$是输入门的偏置项。下图表示了输入门的计算: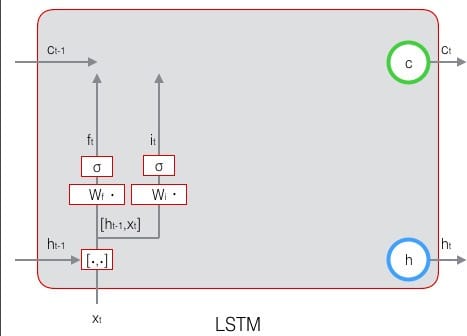
接下来,我们计算用于描述当前输入的单元状态$\tilde{c}_t$,它是根据上一次的输出和本次输入来计算的:
下图是$\tilde{c}_t$的计算: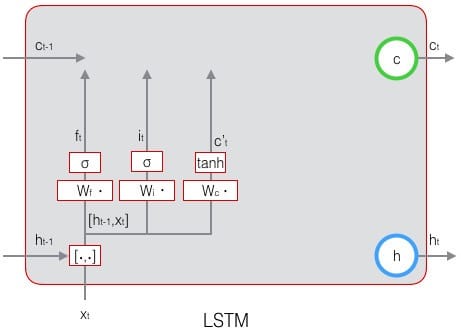
现在,我们计算当前时刻的单元状态$c_t$。它是由上一次的单元状态$c_{t-1}$按元素乘以遗忘门$f_t$,再用当前输入的单元状态$\tilde{c}_t$按元素乘以输入门$i_t$,再将两个积加和产生的:
下图是$c_t$的计算图示: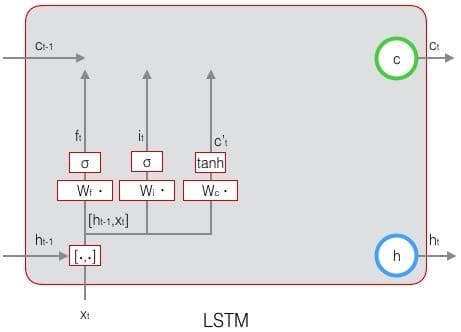
这样,我们就把LSTM关于当前的记忆$\tilde{c}_t$和长期的记忆$c_{t-1}$组合在一起,形成了新的单元状态$c_t$。由于遗忘门的控制,它可以保存很久很久之前的信息,由于输入门的控制,它又可以避免当前无关紧要的内容进入记忆。
3.3 输出门
下面,我们要看看输入门,它控制了长期记忆对当前输出的影响:
下图表示输出门的计算: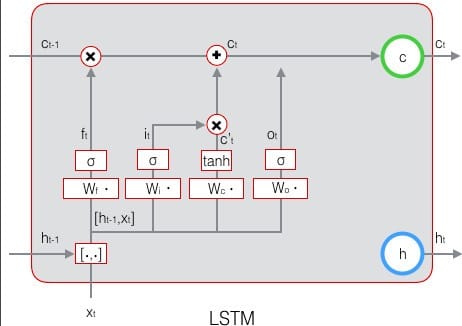
LSTM最终的输出,是由输出门和单元状态共同确定的:
下图表示LSTM最终输出的计算: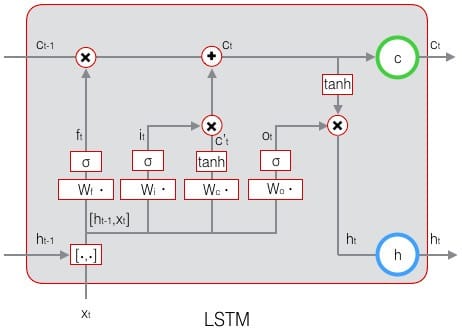
四、LSTM的训练
LSTM的训练算法仍然是反向传播算法,它主要有下面三个步骤:
- 1)前向计算每个神经元的输出值,对于LSTM来说,即$f_t、i_t、c_t、o_t、h_t$五个向量的值。
- 2)反向计算每个神经元的误差项$\delta$值。与循环神经网络一样,LSTM误差项的反向传播也是包括两个方向:一个是沿着时间的反向传播,即从当前t时刻开始,计算每个时刻的误差项;一个是将误差项向上一层传播。
- 3)根据相应的误差项,计算每个权重的梯度。
首先,我们队推导中用到的一些公式、符号做一下必要的说明。
接下来的推导中,我们设定gate的激活函数为sigmoid函数,输出的激活函数为tanh函数。它们的导数分别为:
从上面可以看出,sigmoid和tanh函数的导数都是原函数的函数。这样,我们一旦计算原函数的值,就可以用它来计算出导数的值。
LSTM需要学习的参数共有8组,分别是:遗忘门的权重矩阵$W_f$和偏置项$b_f$、输入门的权重矩阵$W_i$和偏置项$b_i$、输出门的权重矩阵$W_o$和偏置项$b_o$,以及计算单元状态的权重矩阵$W_c$和偏置项$b_c$,因为权重矩阵的两部分在反向传播中使用不同的公式,因此在后续的推导中,权重矩阵$W_f、W_i、W_c、W_o$都会被写成分开的两个矩阵:$W_{fh}、W_{fx}、W_{ih}、W_{ix}、W_{oh}、W_{ox}、W_{ch}、W_{cx}$。
我们解释一下按元素乘$o$符号。当$o$作用于两个向量时,运算如下:
当$o$作用于一个向量和一个矩阵时,运算如下:
当$o$作用于两个矩阵时,两个矩阵对应位置的元素相乘。按元素乘可以再某些情况下简化矩阵和向量的运算。例如,当一个对角矩阵右乘一个矩阵时,相当于用对角矩阵的对角线组成的向量按元素乘那个矩阵:$diag[a]·X=a °X$当一个行向量右乘一个对角矩阵时,相当于这个行向量按元素乘那个矩阵对角线组成的向量:
上面这俩点,在后续推导中会多次用到。
在t时刻,LSTM的输出值为$h_t$。我们定义t时刻的误差项$\delta_t$为:
注意,这里假设误差项是损失函数对输出值的导数,而不是对加权输入$net^l$的导数。因为LSTM有四个加权输入,分别对应$f_t、i_t、c_t、o_t$,我们希望往上一层传递一个误差项而不是四个。但我们仍然要定义出这四个加权输入,以及他们对应的误差项。
4.1 误差项沿时间的反向传播
沿时间反向传导误差项,就是要计算出$t-1$时刻的误差项$\delta_{t-1}$。
我们知道,$\frac{\partial h_t}{\partial h_{t-1}}$是一个jacobian矩阵。如果隐藏层$h$的维度是N的话,那么它就是一个$N×N$矩阵。为了求出它,我们列出$h_t$的计算公式:
显然,$o_t、f_t、i_t、\tilde{c}_t$都是$h_{t-1}$的函数,那么,利用全导数公式可得:
4.2 将误差项传递到上一层
4.3 权重梯度的计算
五、LSTM的变体—GRU(Gated Recurrent Unit)
前面我们讲了一种最为普通的LSTM,事实上LSTM存在很多变体,许多论文中的LSTM都或多或少的不太一样。只要遵守几个关键点,就可以根据需求设计需要的Gated RNNS。在众多的LSTM变体中,GRU也许是最成功的一种。它对LSTM做了很多简化,同时却保持着和LSTM相同的效果。因此,GRU最近变得越来越流行。
GRU对LSTM做了两个大改动:
- 1)将输入门、遗忘门、输出门变为两个门:更新门(Update Gate)$z_t$和重置门(Reset Gate)$r_t$。
- 2)将单元状态与输出合并为一个状态:$h$
GRU的前向计算公式为:
下图是GRU的示意图: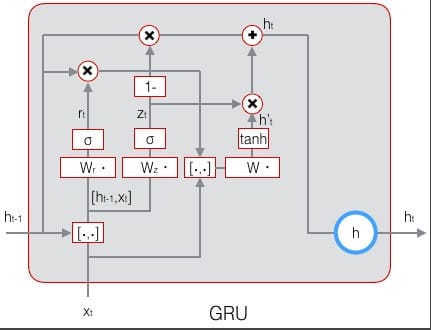
GRU的训练算法比LSTM相对也要简单一些
当然还有很多其他的变体,如 Gers & Schmidhuber (2000) 提出的LSTM变体增加了“peephole connection”;另一种变体使用coupled 遗忘和输入门对遗忘和需要的信息一同做出决定。Yao, et al. (2015) 提出的Depth Gated RNN。还有用一些完全不同的观点来解决长期依赖的问题,如Koutnik, et al. (2014) 提出的Clockwork RNN。
但Greff, et al. (2015)给出了流行变体的比较,结论是它们基本上是一样的。Jozefowicz, et al. (2015) 则在超过一万种RNN架构上进行了测试,发现一些架构在某些任务上也取得了比LSTM更好的结果。

